
Алгоритмы АСУТП на базе математических моделей для имитации управления процессами в реальном времени
Автоматизированные системы управления технологическими процессами (АСУТП) являются критически важными системами, обеспечивающими стабильную работу производственных предприятий и организаций. Для обучения и подготовки персонала часто используются специализированные тренажеры, имитирующие работу реальных систем.
Тренажеры АСУТП позволяют моделировать различные ситуации, возникающие в процессе работы реальной АСУТП, и дают возможность обучающимся отработать навыки работы с системой в безопасной среде.
Имитация АСУТП в тренажерах включает в себя моделирование оборудования, датчиков, исполнительных механизмов, контроллеров и других компонентов системы. Тренажеры обычно разрабатываются с использованием современных технологий и программного обеспечения, что позволяет создавать реалистичные модели и сценарии обучения.
Основными целями использования тренажеров АСУТП являются:
- Обучение новых сотрудников работе с системой и ознакомление их с ее основными функциями и принципами работы.
- Регулярное повышение квалификации и поддержание навыков персонала в актуальном состоянии.
- Отработка действий в аварийных ситуациях и при возникновении нештатных ситуаций.
- Разработка и оптимизация алгоритмов управления технологическим процессом.
- Проведение тестирований и проверок работоспособности системы перед внедрением новых компонентов или модернизацией оборудования.
В тренажерах АСУТП могут быть использованы различные виды моделирования:
- Динамическое моделирование, которое позволяет точно воспроизвести поведение системы в различных условиях и учитывает взаимодействие между различными компонентами.
- Статическое моделирование, которое используется для изучения структуры системы, ее компонентов и связей между ними.
- Обучение на основе сценариев, когда обучающемуся предлагаются различные ситуации и задачи, которые он должен решить, используя свои знания и навыки.
Результатом использования тренажеров АСУТП является повышение надежности и безопасности работы реальных систем, а также снижение риска возникновения аварий и инцидентов.
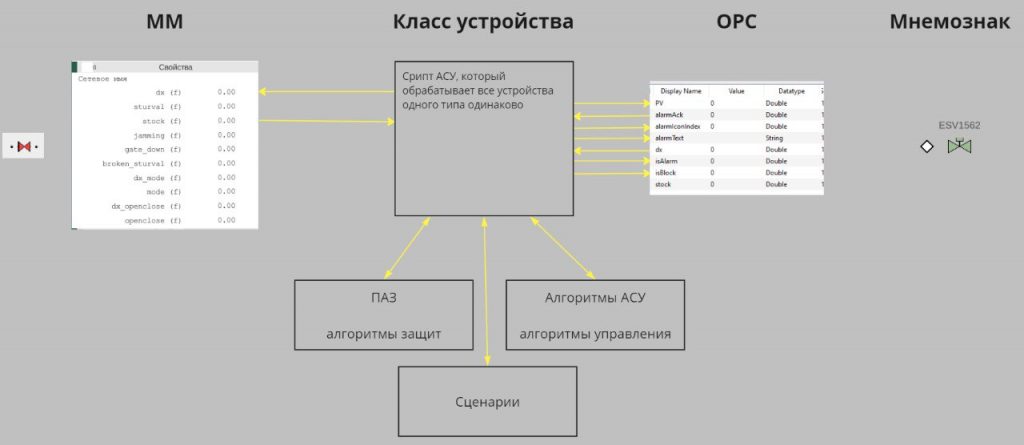
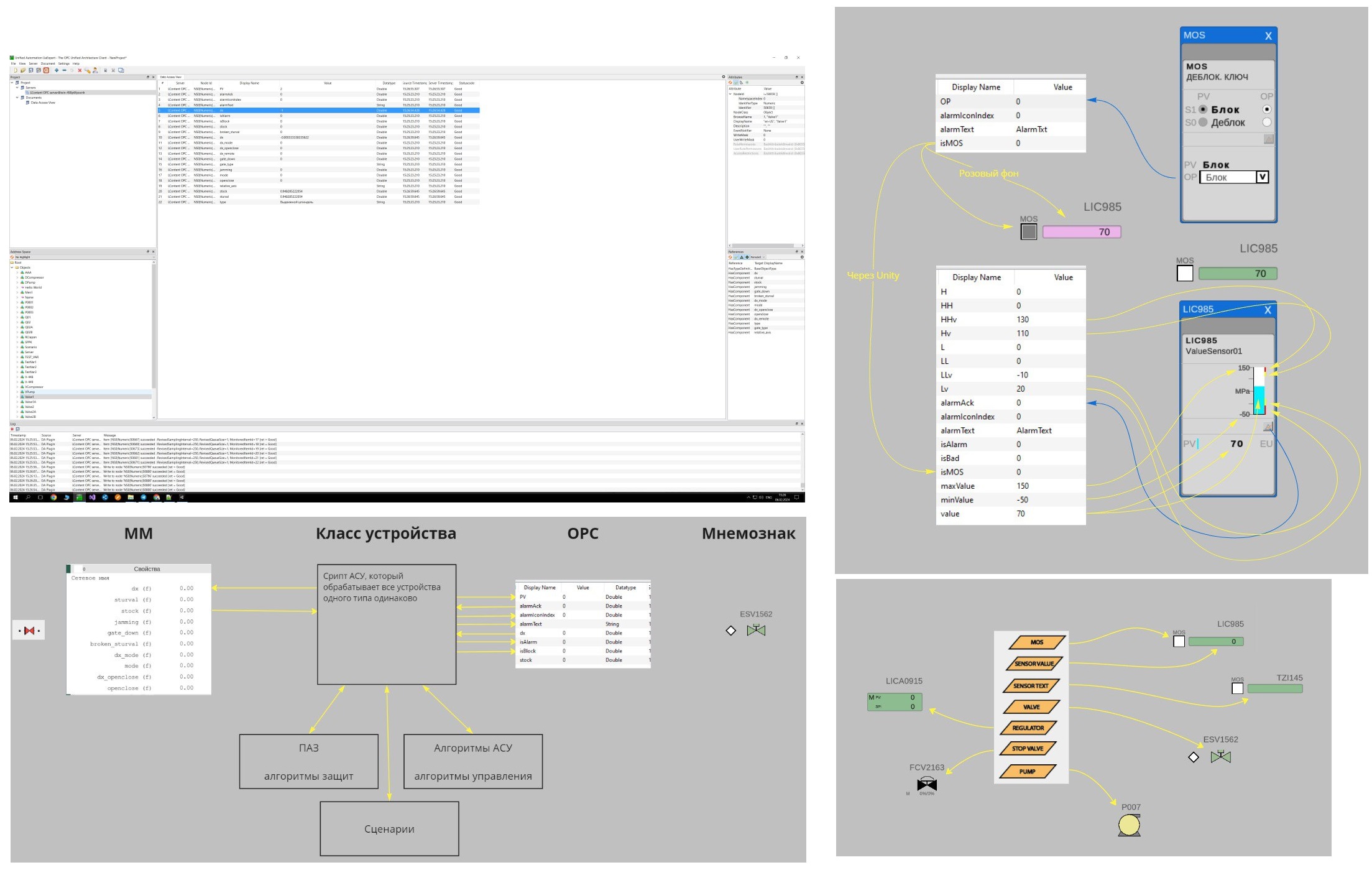
Мы используем стандарт – OPC UA (Unified Architecture) – это открытый стандарт промышленной автоматизации, который обеспечивает взаимодействие между различными устройствами и системами. Он позволяет системам автоматизированного управления (АСУТП), таким как ПЛК (программируемые логические контроллеры), обмениваться данными с другими устройствами, такими как датчики, исполнительные механизмы и панели оператора.
OPC UA позволяет осуществлять обмен данными между различными системами и устройствами в режиме реального времени, что является важным для АСУТП. Он обеспечивает безопасность передачи данных, а также возможность масштабирования системы.
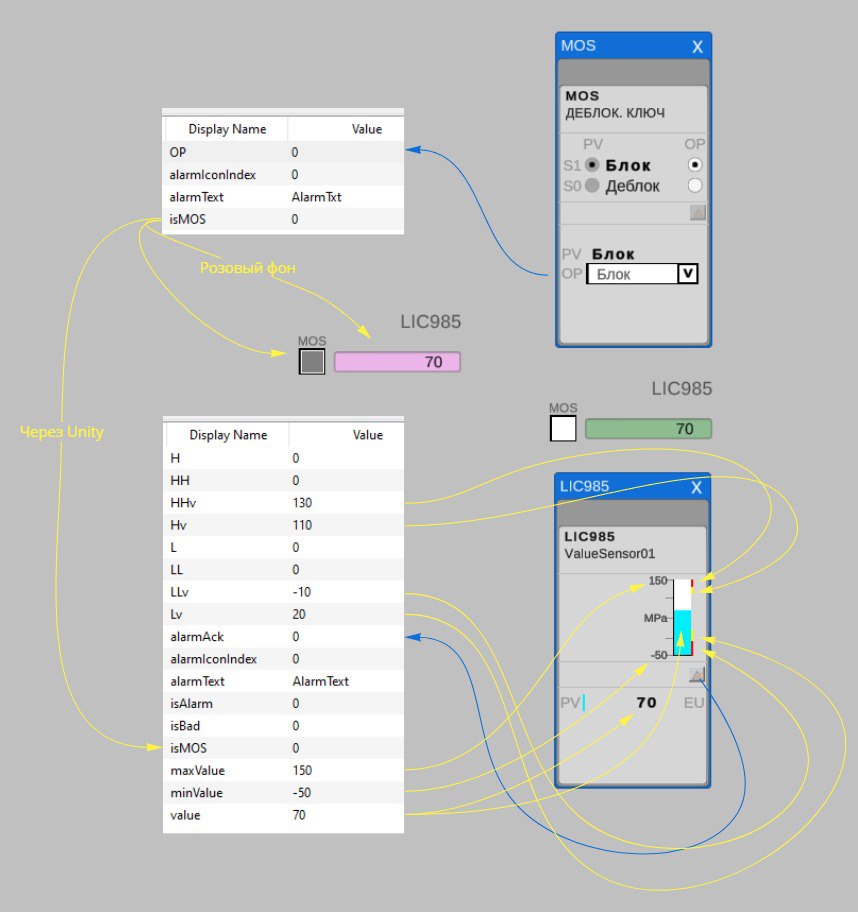
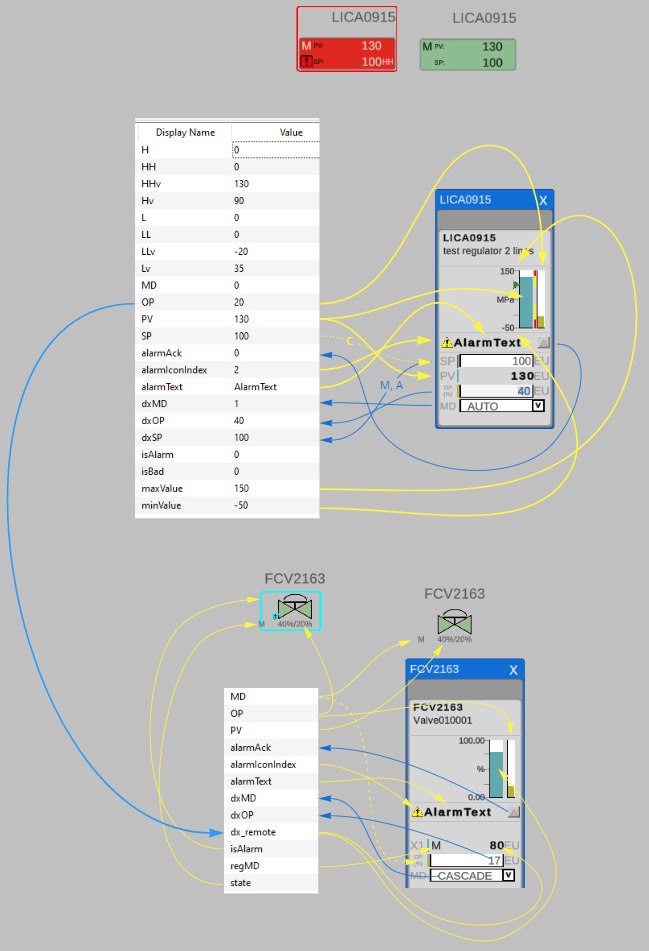
С другой стороны, редактор математической модели – это программное обеспечение, которое используется для создания и редактирования математических моделей. Математические модели используются в АСУТП для описания процессов и управления ими. Редактор математических моделей связан с OPC UA. Это позволяет использовать математические модели в реальном времени для симуляции АСУТП.
Таким образом, связь между редактором математической модели и АСУТП через OPC UA обеспечивает возможность использования математических моделей для управления процессами в реальном времени. Это позволяет улучшить эффективность и точность управления, а также снизить затраты на разработку и внедрение новых систем управления.
Работа редактора математической модели кратко показано на видео:
Более подробно о технологиях компании Lcontent Вы можете прочитать в разделе “технология” нашего сайта (https://lcontent.ru/technology/)
Также мы имеем значительный опыт использования реальных контроллеров – пример – один и тот-же тренажер в разном исполнении, с использованием “реального, настоящего” железа и с использованием “похожей копии” – смотрим – тренажер кустовой площадки добывающих скважин:
 - интерактивный макет фонтанной арматуры, интерактивный макет станции управления (сенсорный экран), система отображения - телевизор, шлемы VR, ноутбуки. (https://lcontent.ru/product/kustovaya-ploshhadka/)")
Вот вид ближе…

Подробно можно посмотреть на RuTube (https://rutube.ru/plst/873041/?r=wd), коротко: https://embedd.srv.habr.com/iframe/69676b89bd24f6785c58f662?theme=dark&mobile=false
Работа пользователя в данном тренажере показана тут – https://rutube.ru/plst/873041/?r=wd

А вот следующий тренажер – точно такой-же (кустовая площадка), но выполненный из “настоящего железа” – симулятор….. отличия ниже:

Вот реальная задвижка… тяжелая, тугая…..
Видео работы:
https://embedd.srv.habr.com/iframe/6967630c29d7357412453a65?theme=dark&mobile=falsehttps://embedd.srv.habr.com/iframe/6967633629d7357412453a8f?theme=dark&mobile=false
А вот реальная станция управления (не имитация, а работа реального контроллера реальной станции) используемая в тренажере – симуляторе.

")
 - внутренности)")
к такой станции можно подключать ПО производителей для настройки и снятия показаний, “как в жизни”, а в имитаторе в виде “сенсорного экрана с нарисованной станцией” – нельзя.
Аналогично и с измерительными приборами с которыми работает оператор добычи – СИДДОС и СУДОС


И реальный прибор СУДОС также используемый в тренажере с возможностью подключения к реальному ПО производителя для снятия и обработки показаний.

Таким образом (лично я) и вижу разницу между “имитаторами” и “симуляторами”. Если за логику работы станции управления отвечает отдельно написанная программа (не код контроллера производителя оборудования) – это симулятор, если используется реальная станция управления – эмулятор. Ну и с другими приборами, управляющими и показывающими устройствами аналогично.
")
, созданный для Нефтеюганского корпоративного института. Тренажер предназначен для проведения обучения и повышения квалификации, отработки безопасных навыков выполнения работ персонала, руководителей и специалистов служб, цехов и отделов, занимающихся вопросами эксплуатации Блочных кустовых насосных станций (БКНС) систем ППД. Юганск-Нефтегаз (https://lcontent.ru/portfolio-grid/)")
")
. (https://lcontent.ru/v-tomskom-politehe-zapushhen-simulyator-dlya-podgotovki-speczialistov-gazovoj-otrasli/)")